

ロボットアーム運動生成 旧来比4倍を超える高速計算手法を開発
量子インスパイアード技術「デジタルアニーラ」を活用した世界初の取り組み
2023年10月16日
早稲田大学
本プレスリリースの詳細は、早稲田大学公式WEBサイトをご覧ください⇒
発表のポイント
ロボットの運動時のエネルギー消費の低減に向けて、効率的な運動軌道を導いたり、その軌道を実現する各時間の加減速への考慮を行ったりするための最適化計算は、これまで運動そのものに比べて膨大な時間を要し、ロボット開発やその進歩にとって大きな障壁となっていました。
組合せ最適化問題を高速に解くことに特化した「デジタルアニーラ」の技術を用いて、ロボットアーム先端の軌道求める最適制御問題として定式化しました。
今回開発した計算手法によって、エネルギー消費の観点で最適な運動生成を達成する高速計算を実現すると同時に約10%のエネルギー消費の低減をもたらすことができました。
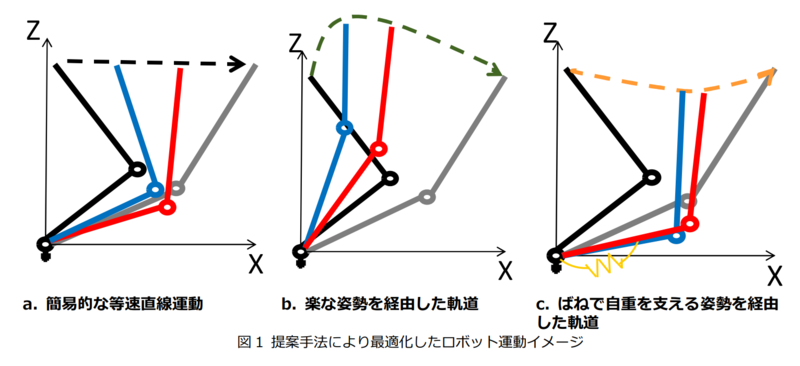
早稲田大学理工学術院総合研究所の大谷拓也次席研究員ならびに同大理工学術院の高西淳夫教授らの研究グループは、富士通株式会社との産学連携により、次世代コンピューティングの一つであるアニーリング方式に属する、富士通の量子インスパイアード技術*1「デジタルアニーラ*2」を用いて、ロボットの構造に応じたエネルギー消費の少ない運動を高速で計算する手法を提案しました。量子インスパイアード技術をロボットアームの運動生成に活用する取り組みとしては世界初となります。
本研究成果は世界最大の学術研究団体であり、全世界に40万人を超える会員を有する米国電子電気学会(IEEE)発行の『IEEE access』に2023年9月28日(木)(現地時間)に掲載されました。
【論文情報】
雑誌名:IEEE access
論文名:Energy Efficient Path and Trajectory Optimization of Manipulators with Task Deadline Constraints
DOI:10.1109/ACCESS.2023.3320143
【用語解説】
*1 量子インスパイアード技術
量子現象に着想を得たコンピューティング技術で、現在の汎用コンピュータでは解くことが難しい「組合せ最適化問題」を高速で解く技術
*2「デジタルアニーラ」
現在の汎用コンピュータでは解くことが困難な組合せ最適化問題を高速に解く富士通独自の量子インスパイアード技術。Fujitsu Computing as a Service Digital Annealer として提供。
.jpg)
-1.jpg)
_クレジット追加.jpg)
.jpg)




