

老朽化した桟橋も安全に点検 自律型桟橋点検支援ロボット 「YURA(ユラ)」の開発に成功



都産技研(地方独立行政法人東京都立産業技術研究センター)とアップウィンドテクノロジー・インコーポレイテッド、東京都立大学、五洋建設株式会社は、自律移動しながら桟橋の点検を行う点検支援ロボット「YURA」TM※1を共同で開発することに成功しました。この成果はCEATEC2023に展示します。
※1 YURA:Your Under-the-pier Robotic Assistant
 自律型桟橋点検支援ロボット「YURATM」
自律型桟橋点検支援ロボット「YURATM」
◆点検ロボット 「YURA」TMの特徴
・揺れに強いコンパクトな水上移動ロボット
→波の影響を受ける海上でも安定した走行
→90×60 cmの小型ボディと旋回機能により狭い桟橋の下でも全方位に自在に移動可能
・360°カメラの高画質動画をリアルタイム送信
→地上の点検作業者に対し、ローカル5G /Wi-Fi6の使い分けで遅延なく高速動画送信
安全な点検作業
これまでの桟橋点検作業は、老朽化したものも多い桟橋の下を作業員が実際に船に乗りながら入り、写真を撮るという危険なものでした。YURATMを利用することで作業者が安全に点検作業を行うことが可能になります。今後、港湾施設での実証実験の評価を行い、2024年度の製品販売を目指します。
CEATEC 2023にて「YURA」を展示
CEATEC2023 都産技研ブースにて、今回開発したYURATMの最新機種の現物をご覧いただけます。実証実験の様子も動画でご紹介します。
会期:2023年10月17日(火)~10月20日(金) 10:00~17:00
会場:幕張メッセ(千葉県千葉市美浜区中瀬2-1)
都産技研ブース ホール7 A120
本事例は、中小企業の5G・IoT・ロボット普及促進事業 公募型共同研究の一環として、アップウィンドテクノロジー・インコーポレイテッド、東京都立大学、五洋建設株式会社と実施したものです。
技術概要
日本全国の港湾施設に多数存在する桟橋の老朽化が進んでおり、維持管理のためには定期的な点検が欠かせません。しかしながら、技術者不足、点検範囲の広さ、人が入りにくい狭い箇所の点検の安全性確保、航空機や船舶運航による時間の制約、波浪の影響などさまざまな課題があげられます。
これらの課題を解決するために、桟橋下の波のある海面を自律航行し、点検箇所の画像や映像を高速かつリアルタイム送信が可能で、少人数で運用可能な桟橋点検支援ロボットが必要とされ、本研究を実施するに至りました。本ロボットによって、桟橋の点検作業の安全性の向上、効率化、点検コストの削減を実現します。
自律型桟橋点検支援ロボット「YURATM」のご紹介◆
ロボット
東京都立大学 武居(たけすえ)研究室が開発した水上自律移動ロボット。LiDAR※2の3次元データを用いて自己位置推定を行い、8つのスラスター※3 を装備し前進後退だけではなく旋回を含む全方向の移動が可能。波浪状態(周期2秒、波高30cm)でも姿勢を保ちながら、自動衝突回避を行いながら指定された経路を指定された位置まで自動航行可能。
※2 LiDAR:「Light Detection And Ranging」 レーザー光を照射して、その反射光の情報をもとに対象物までの距離や対象物の形などを計測する技術
※3 スラスター:姿勢制御、長時間・ゆっくり加速するためのエンジンのこと、本研究ではモーター駆動のスクリューを使用する。
検査画像の高速転送 / ローカル5Gの活用
ローカル5G通信の低遅延かつ安定した接続性を利用したロボットの遠隔操作 (コマンド送信 、状態・位置情報取得)、画像転送 (360度カメラで撮影した4K/30fpsの高画質動画データを低遅延でオペレーターPCに転送)を実現。ロボットがローカル5G電波の圏外となった場合には、自動的にバックアップ用の通信回線であるWi-Fi6に切り替えてロボットの遠隔操作や画像転送を継続する機能を搭載。
実証実験
都産技研の「DX推進センター」(江東区青海)内ローカル5G基地局設置場所にて通信試験と性能評価を実施。五洋建設株式会社技術研究所内の造波装置を備えた水理実験水槽にてロボットの姿勢制御試験、自動航行試験、障害物回避試験などの評価を実施。 図1. 自律型桟橋点検支援ロボット「YURA」の全景
図1. 自律型桟橋点検支援ロボット「YURA」の全景 図2. 自動航行試験の様子
図2. 自動航行試験の様子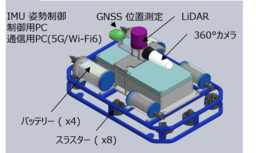 図3. 構成図
図3. 構成図 図4. 360 °カメラ画像
図4. 360 °カメラ画像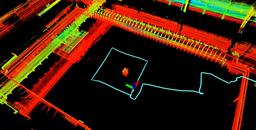 図5.LiDARによる 点検場所の レーダー画像(SLAM画像)
図5.LiDARによる 点検場所の レーダー画像(SLAM画像)
.jpg)
-1.jpg)
_クレジット追加.jpg)
.jpg)




